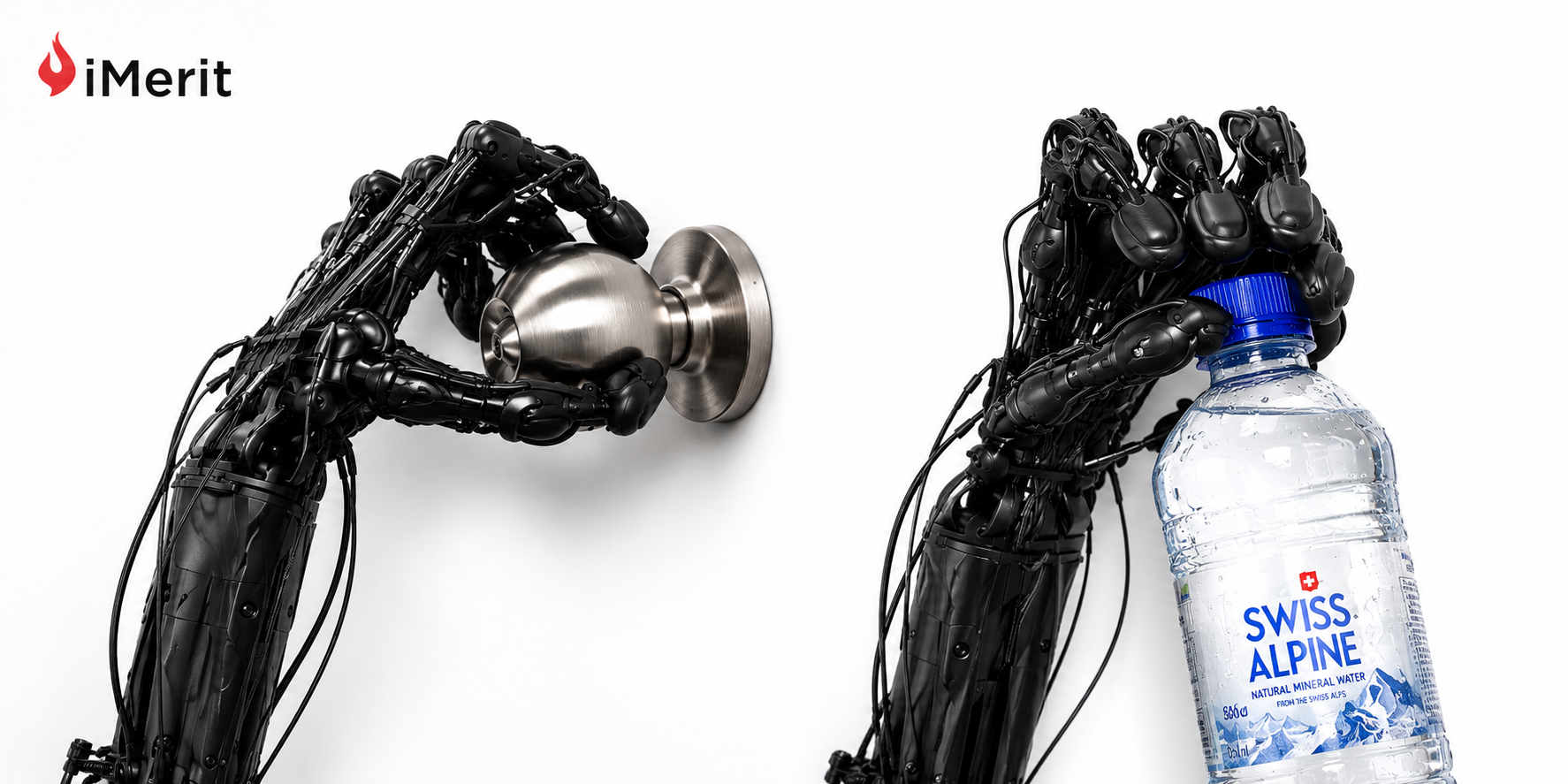
Humanoid robots are being deployed in factories, warehouses, and operating rooms, and mimicking human anatomy in their physical design. But they still fail to perform simple physical tasks like turning a doorknob or opening a bottle cap. This gap exists because modern robotic hands lack dexterous manipulation, the ability of a robotic system to perform multi-fingered physical interactions to reorient and reposition objects.
The primary bottleneck is not the hardware, but the scarcity of diverse, multi-modal training data. Stable robotic manipulation requires synchronizing dozens of degrees of freedom (DoFs) with millisecond-level tactile and force feedback. Traditional datasets lack this high-frequency physical telemetry (joint angles, tactile arrays, and contact forces) and leave policies trapped in the sim-to-real gap.
In this article, we will explain what dexterous manipulation is, why it is difficult to train, and how quality data curation bridges the gap between seeing an object and physically interacting with it.
What Is Dexterous Manipulation?
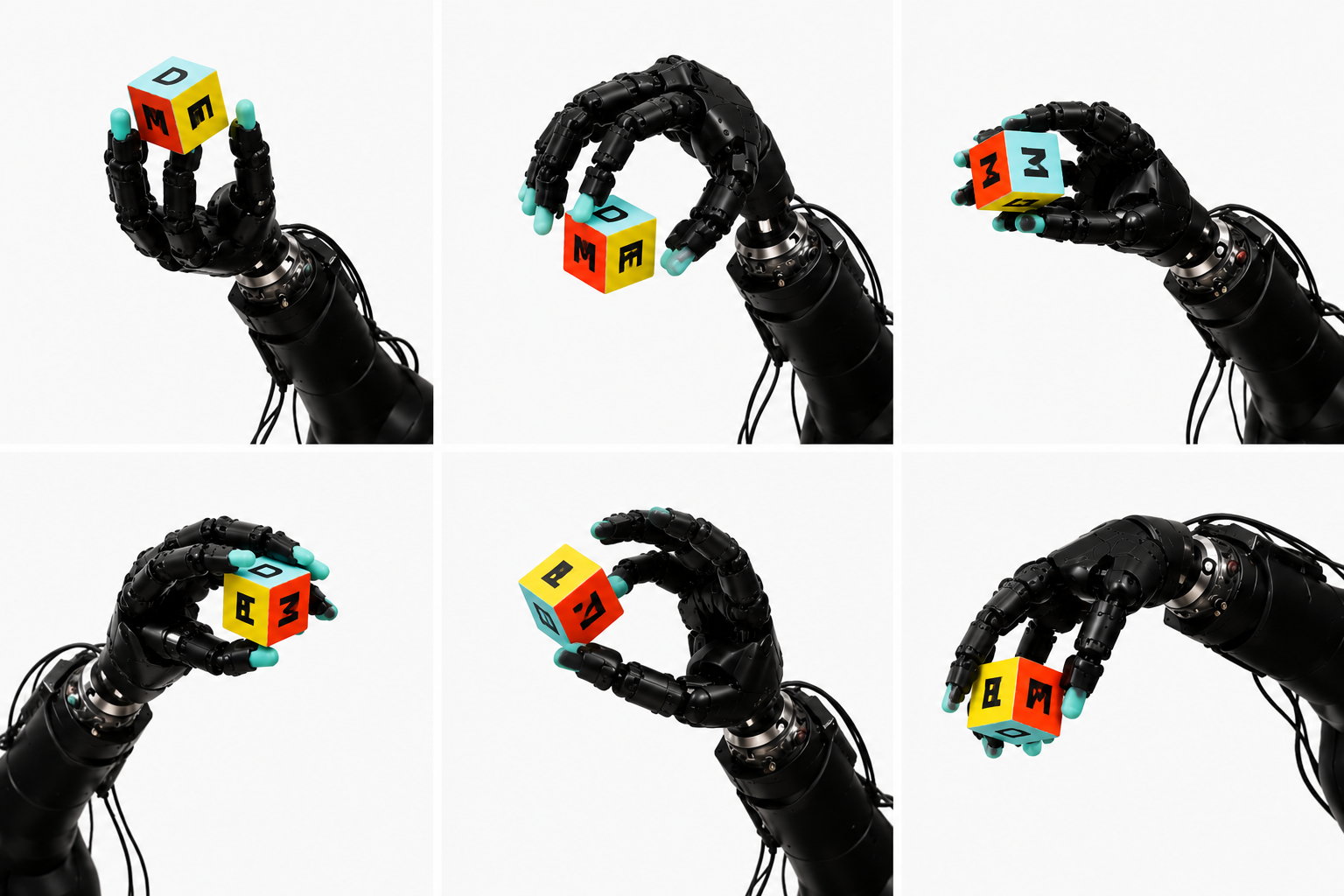
Traditional industrial robots perform simple pick-and-place actions within a limited mechanical range. In contrast, dexterous manipulation involves complex in-hand manipulation such as rotation, re-grasping, and fluid tool use. Unlike traditional parallel-jaw grippers, which only pinch objects, it manipulates objects within the hand without dropping them or needing external support surfaces.
Furthermore, dexterous manipulation requires compliance, adaptability, and contact-rich reasoning. The robot must continuously adjust movements using real-time physics and integrate touch and force data to respond safely to disturbances.
When a robot hand interacts with an object, it must manage several physical properties in parallel:
- Dynamic Grip Force: Applying sufficient pressure to hold the object securely without damaging it.
- Finger Coordination: Moving fingers independently yet working in unison to balance the object’s weight and shift its orientation.
- Tactile Feedback Loops: Processing continuous touch signals to detect surface changes and react to slip.
- Object Compliance: Adapting force depending on whether the object is rigid, soft, or highly deformable.
The Key Technical Challenges of Dexterous Manipulation
Teams face several persistent technical challenges when building systems capable of dexterous manipulation:
- High-Dimensional Action Spaces: Multi-fingered hands can have between 16 and 24 degrees of freedom. Coordinated arm-hand movements require the system to manage and synchronize DoFs in real time, which makes robot learning highly inefficient and unstable.
- Discontinuous Contact Mechanics: Manipulation requires constant changes in contact. Managing these non-linear contact mechanics and force controls requires continuous sensing and instant adjustments for friction, slip, and deformation. Most robotic systems still lack the feedback resolution to do this reliably across varied objects.
- The Perception Deficit (Partial Observability): A vision system cannot capture crucial physical traits, such as an object’s weight, surface texture, or internal stiffness. This partial observability lets the robot make assumptions about the object’s physical properties until it physically touches it.
- The Sim-to-Real Reality Gap: To bypass the slow, expensive process of real-world training, teams often train policies in physics simulators. But, simulators fail to replicate physical reality due to three primary discrepancies:
- Perceptual Gap: Simulators provide ground-truth state information such as object poses and joint angles. Physical deployments must infer these states from noisy sources, including camera calibration errors, lighting shifts, and vision-based pose estimation.
- Discrepancies in Actuator Dynamics: Physical actuators exhibit nonlinear behavior that is often simplified or omitted in simulation, causing commanded actions to produce different forces in reality.
- Discrepancies in Contact Physics: Most simulation engines depend on simplified rigid-body contact models to preserve computation. They fail to capture micro-slip, rolling resistance, stochastic surface interactions, and material deformations of soft, compliant fingertip elastomers.
Why Data Is the Missing Layer
Modern robotics suffers from a model grounding problem. Advanced neural network architectures and computational power are widely available. Despite these resources, capable and adaptive robotic hands remain exceptionally rare. Unlike computer vision, which primarily relies on static images, robotic manipulation data carries a highly complex payload. This payload must capture:
- Synchronized joint states and joint angles of both the arm and hand.
- The end-effector poses six degrees of freedom (SE(3)).
- Force and torque readings and ground-truth contact force profiles.
- Tactile signals and pressure distributions across the fingers.
Acquiring this rich payload is challenging due to sourcing constraints. Collecting contact-rich manipulation demonstrations is slow, costly, and physically hard to scale. It requires advanced data manipulation techniques to clean, parse, and structure it for robot learning pipelines.
Telemetry synchronization adds further complexity. Physical demonstrations require aligning a 30 Hz camera feed, 200 Hz IMU telemetry, and 1 kHz joint position and torque control loops across a unified, sub-millisecond timeline. If the data pipeline’s orchestration is misaligned by even 5 ms, the resulting policy associates the wrong force and torque vectors with the wrong visual frames. This corrupts the entire training process and leads to systematic controller failures at execution time.
Optimizing Data Quality: The Critical Modalities for Dexterous Manipulation
To move from simulation to real-world performance, your data must contain specific, high-fidelity modalities, such as:
- Kinesthetic Baselines: Demonstrations where a person physically guides robot arms to establish gold-standard trajectories for imitation learning. But, kinesthetic teaching is physically demanding and time-consuming at scale. Alternatively, users can collect demonstrations via teleoperation using VR controllers to capture higher state diversity.
- The Sensation Vector: Tactile data, such as fingertip pressure arrays from sensors like GelSight Mini, tracks contact geometry, vibration, and slip onset. High-resolution tactile sensors provide the critical feedback needed to adjust grip force before a drop occurs.
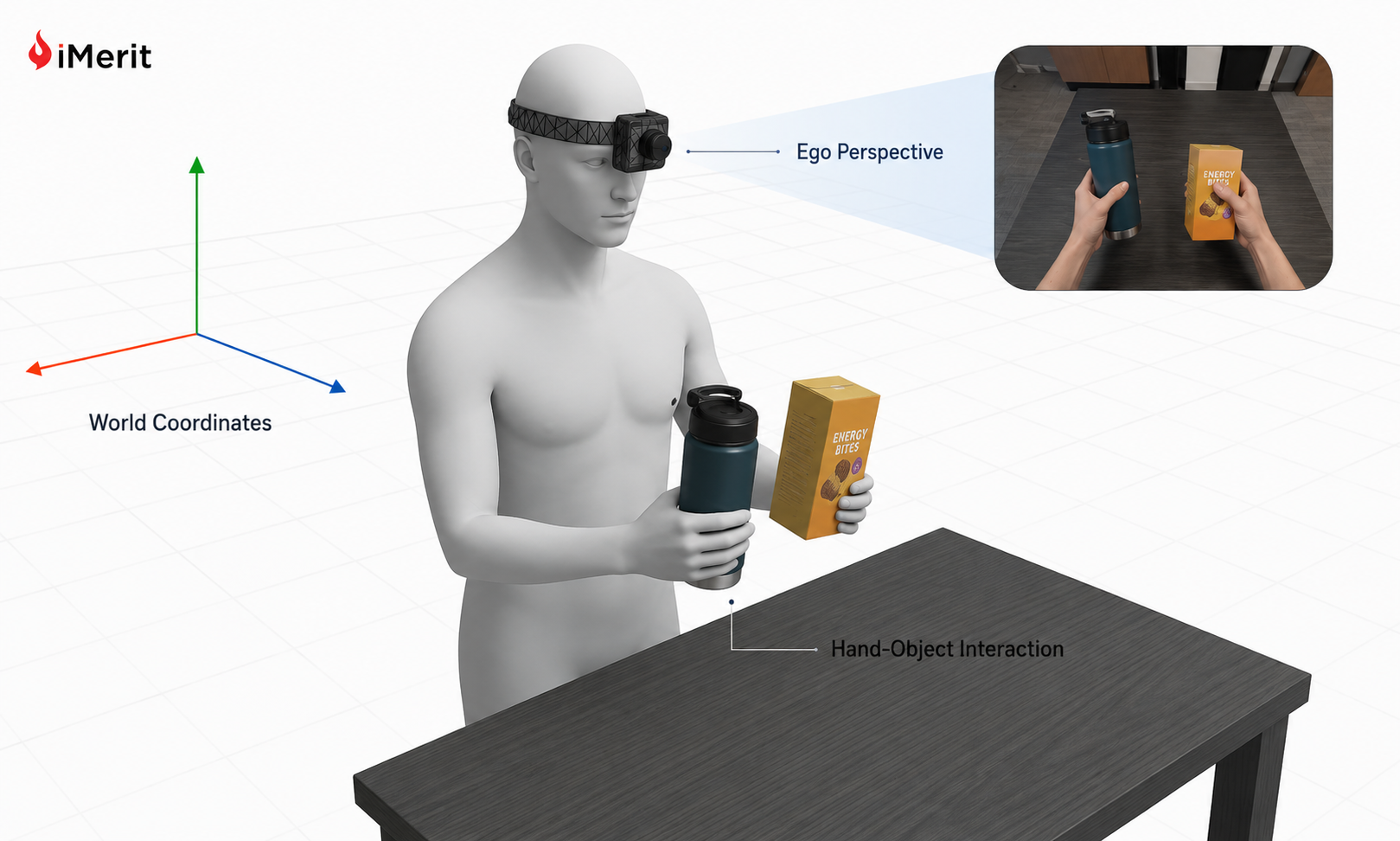
- Close-Range Perception: Wrist-mounted and eye-in-hand cameras provide close-range visual feedback. This feedback captures exact object states, tracks hand-object interactions, and observes material deformation during physical contact.
- Force Propagation: Force and torque logs provide ground-truth profiles required for safe, compliant manipulation of fragile items.
While defining these modalities is the first step, finding high-volume, real-world data that satisfies them remains the primary hurdle for most teams. To address this, the robotics community has turned to large-scale egocentric human manipulation datasets, such as:
- EgoDex: Built using Apple Vision Pro on-device SLAM and calibrated cameras, this passively scalable dataset contains 829 hours (90 million frames) of 30 FPS, 1080p egocentric video. It is paired with dense 3D hand and finger tracking (25 joints per hand) across 194 tabletop tasks.
- EgoGrasp: A crowdsourced dataset containing over 1,800 clips of grasping interactions across more than 620 everyday object categories. It features rich metadata such as 6-DoF camera poses, 200 Hz IMU telemetry, and temporal action segmentation labels.
- EgoLive and EgoVerse: Large-scale platforms for robot manipulation learning providing 1,362 hours of collaborative, structured human demonstrations spanning 1,965 tasks, 240 scenes, and 2,087 unique demonstrators.
These datasets provide the necessary scale. However, many still fall into the fragile policy trap, in which coarse labels for grasp types or contact regions, and limited domain-specific coverage, yield policies that fail under minor real-life variations.
If you need to collect and annotate your own custom egocentric datasets that scale across real-world variations, iMerit can help you operationalize a model-ready input data pipeline.
For example, iMerit partnered with a next-gen humanoid robotics startup to accelerate their robot learning training process. The humanoid project managed over 200 hours of real-world household recordings using Meta Quest 3 headsets for first-person capture. iMerit expanded a standard gesture taxonomy into 37 highly detailed sub-classifications, turning raw video data into actionable training data for robotic manipulation.
iMerit’s specialized annotators used this taxonomy to track fine-grained interactions, such as mapping precise reach, grasp, and manipulation phases across video timelines. They also documented ground-level egocentric human movements in deployable robotic policies.
Scaling Production-Ready Manipulation Data: How iMerit Supports Robotic Perception
iMerit supports advanced workflows for robotic perception through specialized tools and a domain-trained workforce:
- Egocentric Video and Action Segmentation: Slicing teleoperation and human demonstration videos with accurate frame-level behavioral, milestone, and failure-mode labels, the foundation for imitation learning pipelines.
- Tactile and Proprioceptive Data Structuring: Leverages Ango Hub’s time-series annotation capabilities to bind localized force vectors and joint angles to specific visual frames. It creates synchronized, multimodal datasets to train closed-loop policies for edge-case detection and grip force adjustment.
- 3D Multi-Sensor Fusion and Skeleton Tracking: Applying iMerit’s 3D Multi-Sensor Fusion Tool to map and track 3D bounding boxes, polygon trajectories, and keypoint skeletons across cameras and LiDAR for full spatial awareness.
- Quality Assurance and Human-in-the-Loop Validation: Utilizing iMerit Scholars to perform rigorous policy audits, RLHF, and edge-case validation to prevent brittle robotic deployments.
Conclusion
The hardware problem in dexterous manipulation is largely solved, but the physical AI industry still faces a severe deficit of high-quality, real-world training data. Building capable, adaptive robotic hands requires collecting and structuring multimodal interaction streams. Achieving this at scale requires advanced data manipulation to temporally synchronize joint angles, tactile arrays, and force feedback across unified timelines.
Contact our experts today to discuss how we can accelerate your robotics data program.