Dexterous manipulation is where robotics meets its hardest annotation problems — 6-DoF pose estimation, grasp taxonomy labeling, multi-view RGB-D synchronization, and real-world contact physics. iMerit delivers the domain-trained workforce and Ango Hub platform to get it right.
Most annotation vendors approach robotics data as a 2D image problem with extra steps. Dexterous manipulation requires a fundamentally different approach: annotators who understand grasp taxonomies, can reason about contact geometry, and can maintain label consistency across multi-view RGB-D sequences where object occlusion is constant.
SYNCHRONIZED
MULTI-SENSOR ANNOTATION
RGB-D, LiDAR, IMU, force/torque, and egocentric video annotated in a unified timeline — cross-modal consistency enforced at the frame level.
TEMPORAL
INTERPOLATION
Automatic object tracking across sequential frames with annotator-controlled correction — reduces redundant re-annotation while maintaining per-frame accuracy.
AI-ASSISTED
PRE-LABELING
ML-generated initial annotations for pose and bounding box tasks, reviewed and corrected by domain-trained human annotators before delivery.
AUTOMATED
QA RULES
Configurable validation checks detect missing labels, misaligned poses, and cross-sensor inconsistencies before data exits the annotation pipeline.
ANNOTATION CAPABILITIES
Every data type your manipulation policy needs to learn from.
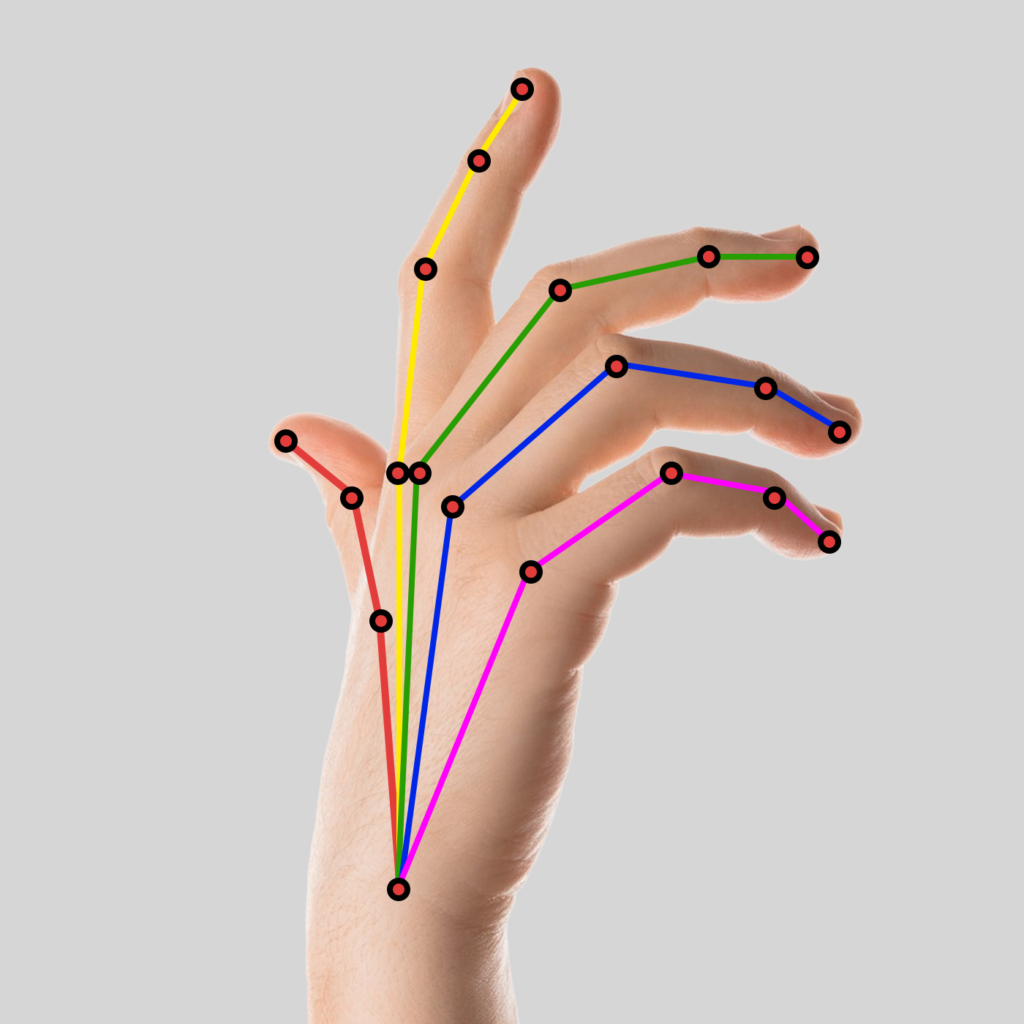
HAND & FINGER KEYPOINT ANNOTATION
Full 21-joint hand skeleton annotation across RGB-D and egocentric video sequences. MANO parameter extraction, per-joint angle labeling, and temporal consistency across occlusion events.
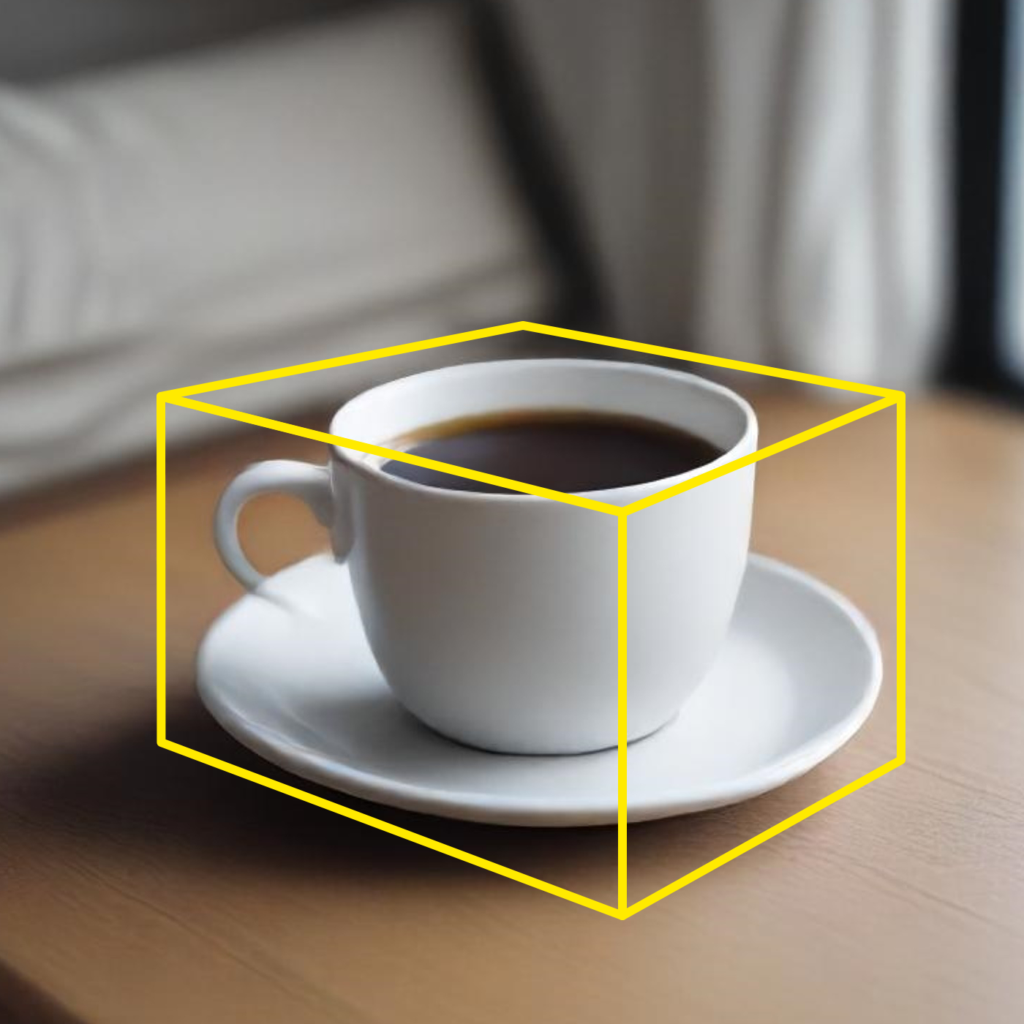
OBJECT 6-DOF
POSE ESTIMATION
Precise translation (x,y,z) and rotation (quaternion) labeling for manipulation objects across multi-view setups. Ground truth for pose estimation models used in grasp planning pipelines.
GRASP TAXONOMY
LABELING
Classification across 21 grasp types — power grasps, precision pinches, tripod grips, in-hand reorientations, and functional grasps — aligned to established Feix taxonomy standards.
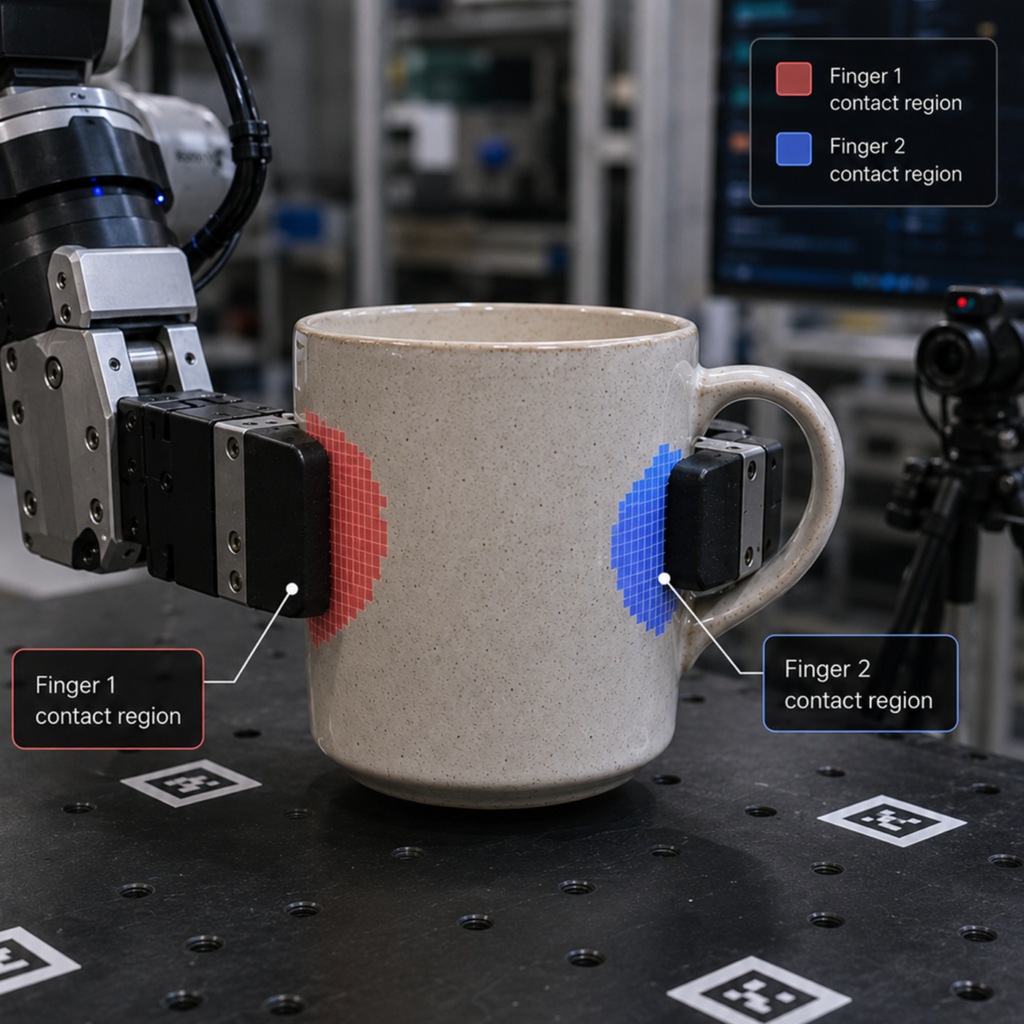
CONTACT REGION
ANNOTATION
Per-finger, per-frame contact region masking identifying which fingers are in contact and at which object surface points — critical for contact-rich manipulation policy training.
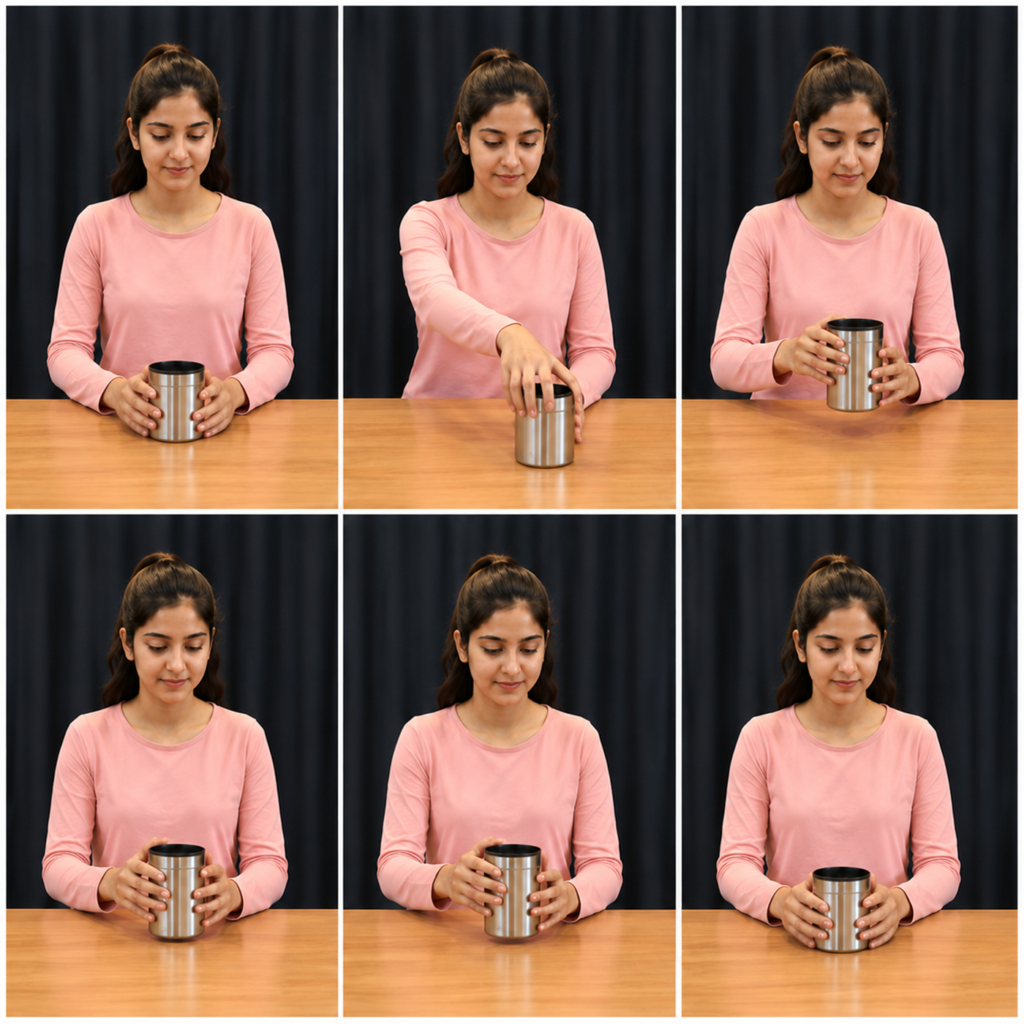
ACTION PHASE
SEGMENTATION
Temporal segmentation of manipulation sequences into phases: approach, pre-grasp, grasp, lift, transport, place, and release — enabling models to learn task decomposition and failure recovery.
EGOCENTRIC VIDEO
ANNOTATION
Frame-level annotation of first-person manipulation video from wrist-mounted and head-mounted cameras — including hand-object interaction labeling, contact event tagging, and gaze-aligned action segmentation across teleoperation and demonstration datasets.
“High-quality real-world data drives embodied intelligence, and consistent labeling is equally vital.”
– Head of Imaging, Humanoid Robotics Startup
CASE STUDY
Human-Centered Robot Training
Robotics startup partnered with iMerit to record, annotate, and classify real-world household task data to train next-generation humanoid robots.
The client sought a partner to coordinate 200 hours of in-home task recording using Meta Quest 3 head-mounted cameras worn by participants completing daily activities. The raw footage needed extensive structure: classification of 9 core household task types, 37 sub-classifications, and precise tracking of objects, motions, outcomes, and contextual cues.
Every program maps directly to the data challenges your manipulation team is actually solving — from teleoperation datasets to contact-rich policy training.
HUMANOID ROBOT
TELEOPERATION DATASET
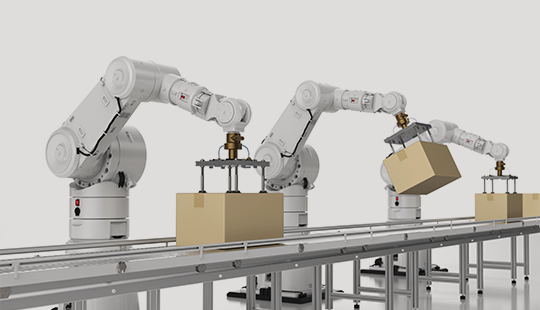
iMerit coordinates human operators performing household and industrial manipulation tasks, captured from wrist and head-mounted cameras. Annotated with hand keypoints, action phases, and contact events across diverse object categories.
GRASP POLICY TRAINING
FOR BIN PICKING
6-DoF pose estimation and grasp taxonomy labeling across hundreds of object categories in cluttered bin environments. The most common high-volume dexterous manipulation annotation program in production — covering power grasps, precision pinches, and functional grasps.
CONTACT-RICH MANIPULATION
FOR IN-HAND REORIENTATION
Per-finger contact region masking and force/torque event labeling for manipulation sequences involving in-hand object reorientation. The hardest annotation problem in the dexterous manipulation stack — and the most differentiated capability iMerit offers.
VLA MODEL TRAINING
DATA PIPELINE
End-to-end annotation pipeline for Vision-Language-Action model training — action phase segmentation, object state labeling, and instruction-action alignment across large-scale demonstration datasets. Directly relevant to foundation model development for physical AI.
INDUSTRY VERTICALS
Built for every domain where robots need to understand and interact with the physical world.
INDUSTRIAL
HUMANOID ROBOTS
Grasp taxonomy, object pose estimation, action phase segmentation, and multi-sensor fusion annotation for humanoid manipulation programs.
WAREHOUSE & LOGISTICS
Pick-and-place sequence labeling, bin-picking pose annotation, conveyor tracking, and pallet interaction labeling for AMR and robotic arm programs.
SEMICONDUCTOR & ELECTRONICS
Precision manipulation annotation for high tolerance PCB assembly, chip handling, and micro component placement — supporting cobot programs where millimeter-level accuracy is required.
AGRICULTURAL
ROBOTICS
Crop interaction annotation, grasp labeling for irregular organic shapes, plant detection, and multi-sensor fusion for precision harvesting systems.
MANUFACTURING & ASSEMBLY
Component identification, tool-use annotation, assembly phase labeling, and workspace segmentation for collaborative robot (cobot) programs.
HOME & SERVICE ROBOTS
Object interaction, indoor scene segmentation, intent prediction, and safe multi-agent navigation annotation for home robot and assistive AI programs.
RESEARCH & FOUNDATION MODELS
Large-scale dataset creation aligned to established grasp taxonomies for robot learning, sim-to-real transfer, and vision language-action model training.
AUTONOMOUS GROUND DELIVERY
Last-mile interaction labeling, curbside object detection, handoff gesture annotation, and dynamic environment segmentation for delivery robot programs.
The difference between 95% and 99% acceptance rate isn’t tooling. It’s whether your annotators understand what they’re labeling. iMerit’s annotators are full-time, salaried employees trained in domain-specific curricula before touching any client project.
FULL-TIME
SALARIED TEAM
Not gig workers. iMerit’s annotators are permanent employees assessed at an 80%+ threshold before going live — and domain-trained before touching your data.
2-STAGE
QA WORKFLOW
Every program runs a dedicated production stage followed by a separate QA review layer. Errors caught before they reach your training pipeline.
STRUCTURED
PILOT FIRST
Schema design, team selection, training, and a calibration batch — all before production scale. Quality validated against your acceptance criteria.
ENTERPRISE
SECURITY
SOC 2 Type II · ISO 27001 · GDPR compliant. Full audit trails and strict access controls across every program.
WHY WORK WITH US
MANAGED GLOBAL
WORKFORCE
Managed service that allows you to leverage a large and diverse global workforce to create the real-world data needed for physical AI and dexterous manipulation programs.
END-TO-END
SOLUTION
From talent recruitment to data creation, collection, and annotation — iMerit combines the technology and talent into a single solution so you can focus on model development.
QUALITY ASSURED
Rigorous training and quality assurance processes with proven annotation protocols — ensuring you’re getting the high-quality dexterous manipulation data your models require.
Share your sensor configuration, annotation scope, and scale targets. We’ll scope a pilot program that proves quality before you commit to production volumes.