Sensor fusion combines data from multiple sensors to create a unified view of the environment. For camera and LiDAR in particular, fusion only works when spatial calibration and temporal synchronization are tightly controlled across both sensors.

Each sensor contributes different strengths. Cameras capture rich visual context such as object appearance, road markings, and traffic signals, while LiDAR provides precise depth and spatial geometry. When aligned properly, they strengthen overall scene understanding.
In autonomous systems, their alignment is critical to prevent perception failures. Even a small misalignment between LiDAR and camera data can disrupt perception accuracy. Objects may appear shifted, partially matched, or incorrectly localized, affecting detection performance in real-world conditions.
This article explores how LiDAR and camera fusion depend on multimodal alignment quality and how perception teams can align LiDAR and camera data to improve sensor reliability.
Why LiDAR-Camera Fusion is Critical in Autonomous Systems
A single sensor doesn’t cover everything in real driving conditions. Cameras capture detailed visual information, but depth estimation can become unreliable in low-light or high-glare scenarios. LiDAR addresses this by capturing precise spatial geometry, though it does not carry the same level of semantic detail.
This limitation in each modality makes fusion essential for building a more complete and reliable perception pipeline. LiDAR-camera fusion improves object detection robustness by combining spatial accuracy with semantic understanding. It also enhances 3D depth perception by leveraging LiDAR’s distance measurements alongside camera-based visual cues. The technique enables more accurate object localization.
This matters more in situations that are not clean or predictable. For instance, dense traffic, partially hidden objects, or quick light changes. In these cases, having both geometry and visual information makes it easier for the system to stay consistent from one frame to the next.
Fusion also makes the system less dependent on a single sensor. If a camera is affected by glare as it approaches an intersection, LiDAR can still provide stable distance information about nearby vehicles or pedestrians. This kind of redundancy is important in safety-critical perception scenarios, such as at intersections or during merging traffic, where missed detections can lead to immediate safety risks.
Challenges in Aligning LiDAR and Camera Data
Alignment issues don’t come from one failure point. Small gaps across LiDAR-camera calibration, timing, and data capture start to add up, especially in large-scale datasets.
- Small shifts in calibration change how LiDAR points map onto camera frames. A slight offset can push points away from object edges and break alignment at boundaries.
- LiDAR and camera frames are not always captured at the same instant. When timestamps drift, moving objects appear in different positions across sensors, making correspondence unreliable.
- Dynamic scene complexity makes it harder to maintain alignment between LiDAR and camera data. Real-world scenes do not stay consistent across frames. Vehicles change direction, pedestrians move unpredictably, and occlusions hide parts of the scene.
- Environmental variability creates inconsistency between sensor outputs. Camera data can change with lighting conditions such as glare, shadows, or low visibility. Similarly, LiDAR responds differently to situations such as rainy weather or reflective surfaces.
- Data collected across multiple vehicles introduces variation in sensor position and angle. This leads to differences in how LiDAR and camera data align across the dataset.
These issues often appear as small inconsistencies but become more visible at scale, especially during annotation and cross-modal validation.
iMerit can help overcome these challenges through large-scale LiDAR–camera–radar annotation and alignment workflows that help improve dataset consistency for perception model training.
How to Align LiDAR and Camera Data for Reliable Perception
Perception teams improve multimodal fusion reliability by integrating alignment validation into dataset preparation workflows.
Here are the steps to align LiDAR and camera data for reliable sensor fusion:
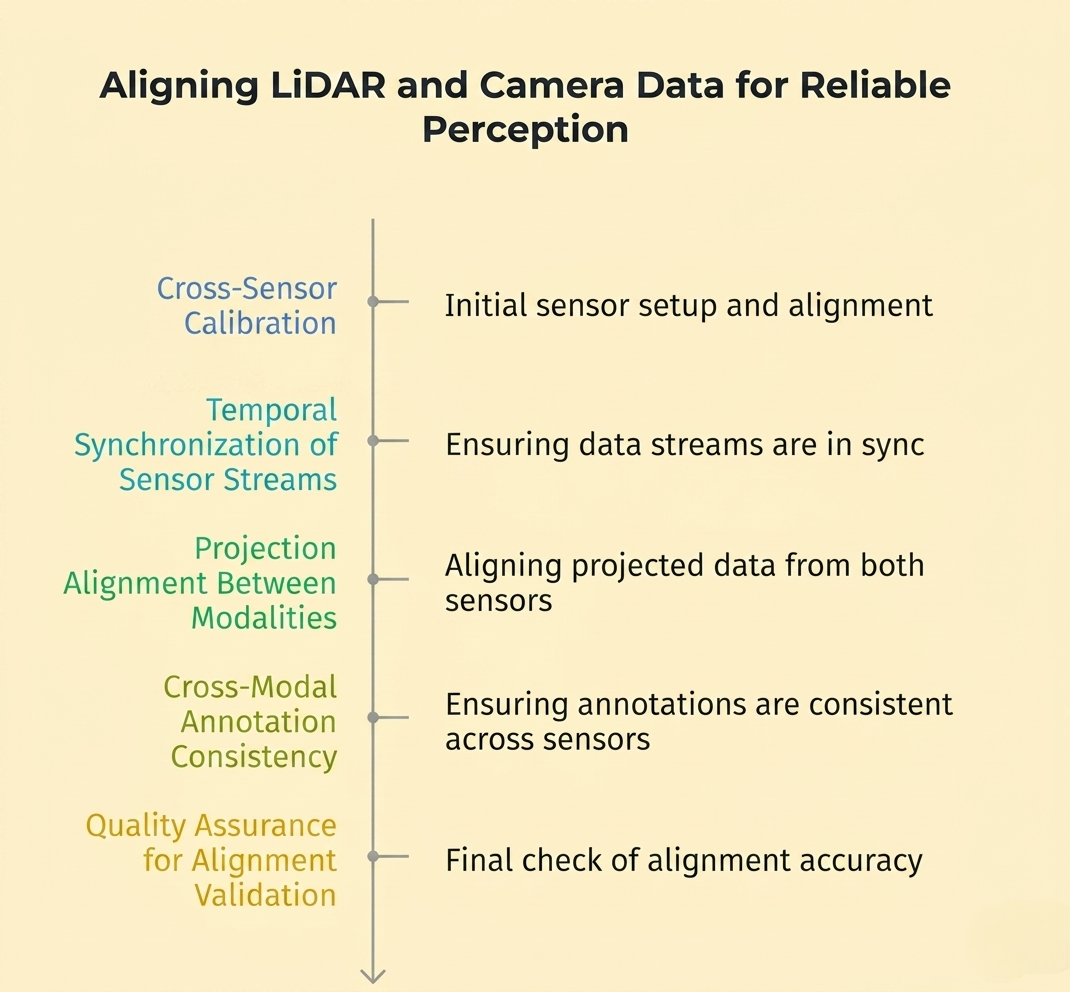
1. Cross-Sensor Calibration
Align LiDAR and camera data in the same coordinate system so that 3D points can be correctly mapped onto image space. This requires estimating the camera’s position and orientation relative to the LiDAR using extrinsic calibration.
To do this, perception teams can use calibration targets, such as checkerboards, or match features directly from the scene. Many pipelines now rely on targetless calibration, where edges, planes, or object boundaries are used instead of physical markers.
Recent research moves beyond one-time calibration by using multiple LiDAR and image frames together. For example, methods combine semantic segmentation with motion-based optimization to estimate and correct extrinsic parameters across frames.
2. Temporal Synchronization of Sensor Streams
After calibration, align both sensors in time. LiDAR and cameras often operate at different frequencies, so correctly matching frames is necessary.
Common approaches include:
- Hardware synchronization using shared clocks or GPS timestamps.
- Software-based alignment, where frames are matched using timestamps and interpolated if needed.
For example, if a LiDAR scan is captured at 10 Hz and a camera at 30 Hz, the system selects or interpolates the closest matching frames before fusion.
Some recent approaches use object motion across frames to refine synchronization. They track the same object in both LiDAR and camera data and use its motion to correct small timing offsets when the alignment is slightly off.
3. Projection Alignment Between Modalities
After calibration and temporal alignment, LiDAR points are projected onto the image plane. This step links 3D geometry with the camera’s visual data. Because LiDAR data is sparse while images are dense, even small calibration errors can shift projected points enough to break object correspondence.
You can address this issue using:
- Feature-based matching (edges, contours, keypoints).
- Semantic segmentation to align objects across modalities.
- Joint optimization methods that refine alignment during reconstruction.
Focus on object boundaries, occlusions, and thin structures. If points fall outside object edges or shift into the background, revisit calibration or synchronization.
4. Cross-Modal Annotation Consistency
Alignment issues often become more visible during annotation. A 2D bounding box in the image may not fully match the corresponding 3D cuboid in LiDAR data, particularly in occluded or partially visible scenes.
To reduce this, perform 3D point cloud annotation across both modalities together. Review labels in image and point cloud views to ensure they refer to the same object and maintain consistency.
5. Quality Assurance for Alignment Validation
Alignment needs to remain consistent across frames. Small errors can accumulate over time and become visible in longer sequences or across different capture setups.
Validate alignment by reviewing projection consistency across frames, checking motion-heavy scenarios, and comparing results across vehicles or sensor configurations.
In some cases, the model’s behavior exposes alignment issues. A drop in detection consistency in specific scenarios can indicate underlying alignment gaps in the dataset.
Best Practices for Multimodal Sensor Alignment in Perception Pipelines
Teams don’t achieve reliable alignment in a one-time setup. They must actively manage it during data collection, especially in long-running or multi-vehicle deployments.
- Continuous Calibration Monitoring: Detect drift early during long-duration dataset capture. Re-check sensor alignment periodically, especially after vibration, mounting shifts, or hardware adjustments that can slowly change extrinsic parameters.
- Automated Synchronization Validation: Keep timestamps aligned across LiDAR and camera streams. Flag small timing mismatches quickly and re-align frames before they propagate into fusion or annotation stages.
- Dataset-Level Consistency Checks: Standardize sensor geometry across different vehicles and capture setups. Control placement, angle, and configuration so alignment does not vary from one dataset source to another.
- Cross-Modal QA Before Annotation Scaling: Use human-in-the-loop workflows to validate LiDAR-to-camera projection early. Check alignment at object boundaries and motion-heavy scenes before scaling annotation, so errors don’t get baked into training data.
Conclusion
Reliable sensor fusion depends on how well teams can align LiDAR and camera data in both space and time. Small gaps in calibration or synchronization may not be obvious at first, but they show up quickly in projection, annotation, and model performance.
Key Takeaways
- Accurate LiDAR–camera alignment improves object detection reliability by reducing spatial and temporal inconsistencies across sensors.
- Small misalignment errors show up later as unstable detections and inconsistent model output.
- Consistent multimodal alignment supports stable behavior across different environments, lighting conditions, and traffic situations.
- Sensor fusion reliability depends as much on dataset alignment quality as it does on model architecture.
iMerit’s multi-sensor fusion annotation approach, powered by Ango Hub and scalable 3D tooling, supports precise LiDAR–camera–radar labeling, validation, and dataset alignment. This helps perception teams maintain consistency across multimodal datasets and improve reliability in autonomous mobility systems.
Talk to an iMerit expert to learn how structured alignment workflows can improve your perception pipeline and reduce multimodal inconsistencies at scale.