The development of autonomous vehicles (AVs) is facing a data surge. Fleets with multi-sensor systems produce between 11 TB and 152 TB of data per vehicle daily and pose challenges for storage, processing, and annotation.
The majority of data collected during routine driving captures repetitive, low-variation scenes. For example, miles of highway driving in clear weather without other actors (vehicles) provides little new information and adds no coverage of edge cases. Treating all collected data equally dilutes the training signal and wastes costly human annotation resources.
Sensor data triage addresses this by filtering, scoring, and prioritizing informative and high-quality data from raw AV sensor logs before annotation and training. In this article, we will explain what triage is, how it works, and how AV teams can implement it effectively across LiDAR, camera, and radar sensors.
The Data Bottleneck Facing Autonomous Vehicle Training Programs
Autonomous vehicle fleets utilize a diverse sensor suite to navigate safely, including LiDAR, cameras, radar, and IMU/GPS. Annotating every frame of this multimodal data is economically and operationally impossible. Manual labeling is time-intensive and requires high precision. Attempting to label all raw frames will overwhelm the human workforce, leading to costs and a backlog that delays model updates.
Low-quality or redundant frames introduce label noise. If a dataset is heavily skewed toward simple, repetitive scenes, the resulting model may perform well on average but fail during safety-critical edge cases.
Furthermore, poor upstream data curation leads to expensive retraining and regression testing. When a model fails in the field, teams must determine whether the issue stems from the model or gaps in the training data.
What Is Sensor Data Triage
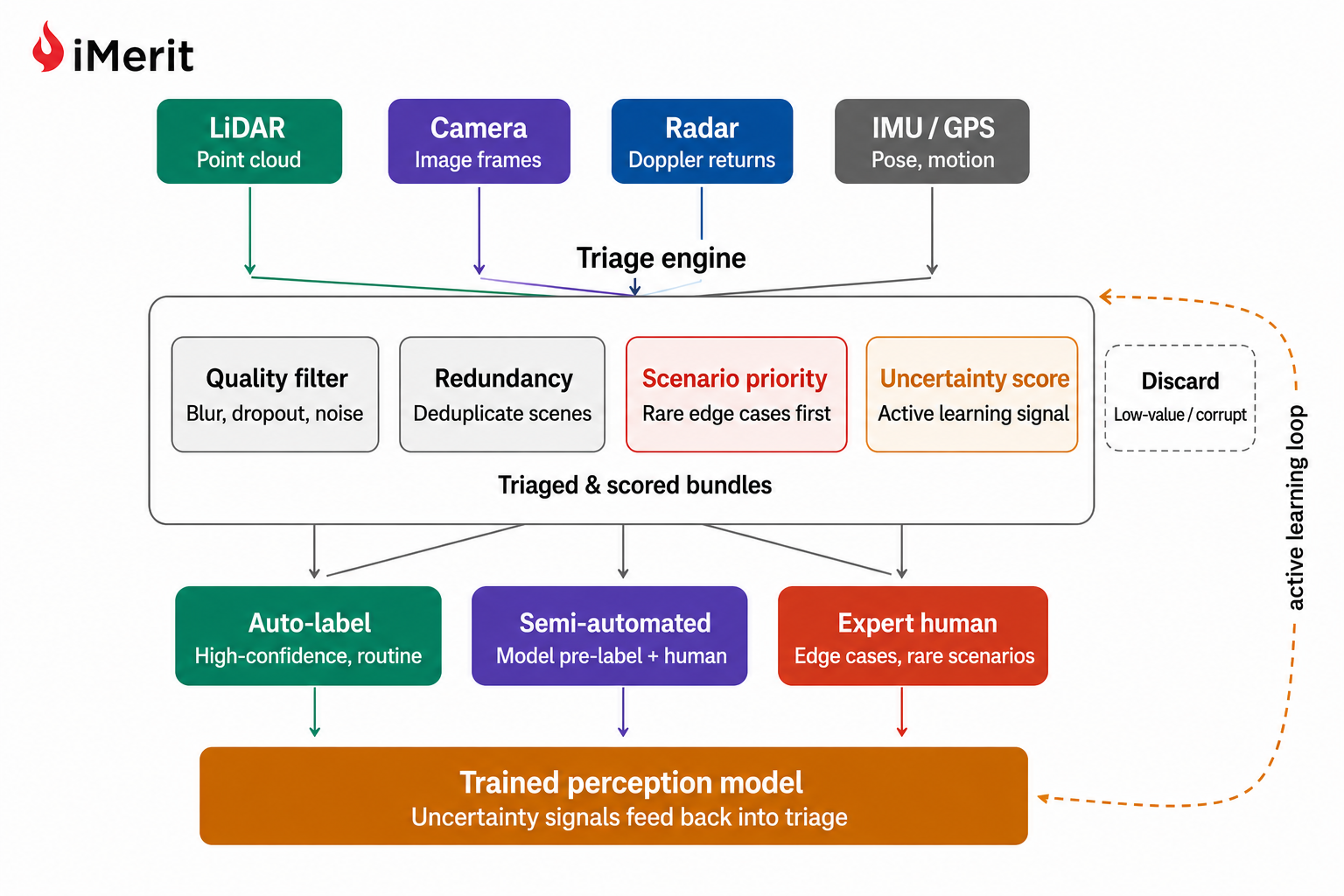
Sensor data triage is a process of evaluating, ranking, and routing raw sensor logs based on their quality, novelty, and training value. Unlike generic data filtering, which might involve simple decimation (keeping only every tenth frame) or random subsampling, triage is scenario-driven. It seeks to identify the specific data segments that will most effectively improve the autonomous stack’s performance.
The multimodal nature of AV data makes triage more complex than in single-sensor domains. So, a triage system must assess value across synchronized LiDAR point clouds, camera frames, and radar returns in parallel.
For instance, an overexposed camera frame might be kept if corresponding radar and LiDAR data capture a rare near-miss event. It prevents the loss of critical information due to a single compromised sensor modality.
Triage decisions are based on several key signals:
- Sensor Quality Metrics: Identifying issues like motion blur, lens artifacts, sensor dropout, or misaligned timestamps.
- Scene Complexity: Assessing the density of objects, the variety of actor classes, and the complexity of the environment.
- Environmental Conditions: Flagging data captured during rain, snow, fog, or challenging lighting conditions like dusk or dawn.
- Scenario Rarity: Identifying long-tail events, such as animals on the road or unusual pedestrian behaviors.
Key Triage Strategies: From Rule-Based Filters to ML-Driven Scoring
Triage systems employ a hierarchy of strategies, including simple rule-based filters and machine learning algorithms.
Rule-Based Quality Filters
Rule-based filters use deterministic checks to remove frames that are unsuitable for training. These include sensor dropout events, LiDAR returns below a density threshold, camera frames with excessive motion blur, and GPS signal loss that compromises vehicle localization.
Redundancy Detection
Redundancy detection removes near-duplicate scenes that add little new coverage. Teams use embedding similarity measures or spatial clustering to identify segments that capture the same scenario with minimal variation. Collapsing these near-duplicates prevents training set imbalance and avoids wasting annotation budget on frames that add zero coverage to the training distribution.
Scenario-Based Prioritization
Scenario-based prioritization uses scene classifiers and scenario ontologies to surface rare but safety-critical events. For example, a triage pipeline might be programmed to prioritize any clip featuring a school bus with its stop arm extended or an occluded pedestrian at a crosswalk. Developers can ensure the model receives consistent exposure to the most challenging parts of its Operational Design Domain (ODD) by automatically identifying these high-value scenarios.
Entropy and Uncertainty Scoring
Machine learning-based triage uses entropy and uncertainty scoring to route sensor data. Entropy measures the uncertainty in a model’s predictions. If a perception model is highly uncertain about whether a group of pixels represents a pedestrian or a lamp post, that frame is flagged as highly informative. Routing these high-uncertainty frames to human annotators ensures that the model learns from the exact data points where its current knowledge is weakest.
Active Learning Integration
In an active learning pipeline, the model itself helps identify which new data it needs most. Rather than treating data collection and triage as a one-time step, active learning continuously feeds model uncertainty signals back into collection tasking and triage prioritization. This process ensures that as the model improves, the data pipeline adapts and keeps annotation effort focused on the frontier of model uncertainty.
Handling Multi-Sensor Triage: LiDAR, Camera, and Radar in Concert
Triage cannot operate on a single sensor in isolation. It must assess quality and value across the fused sensor stream.
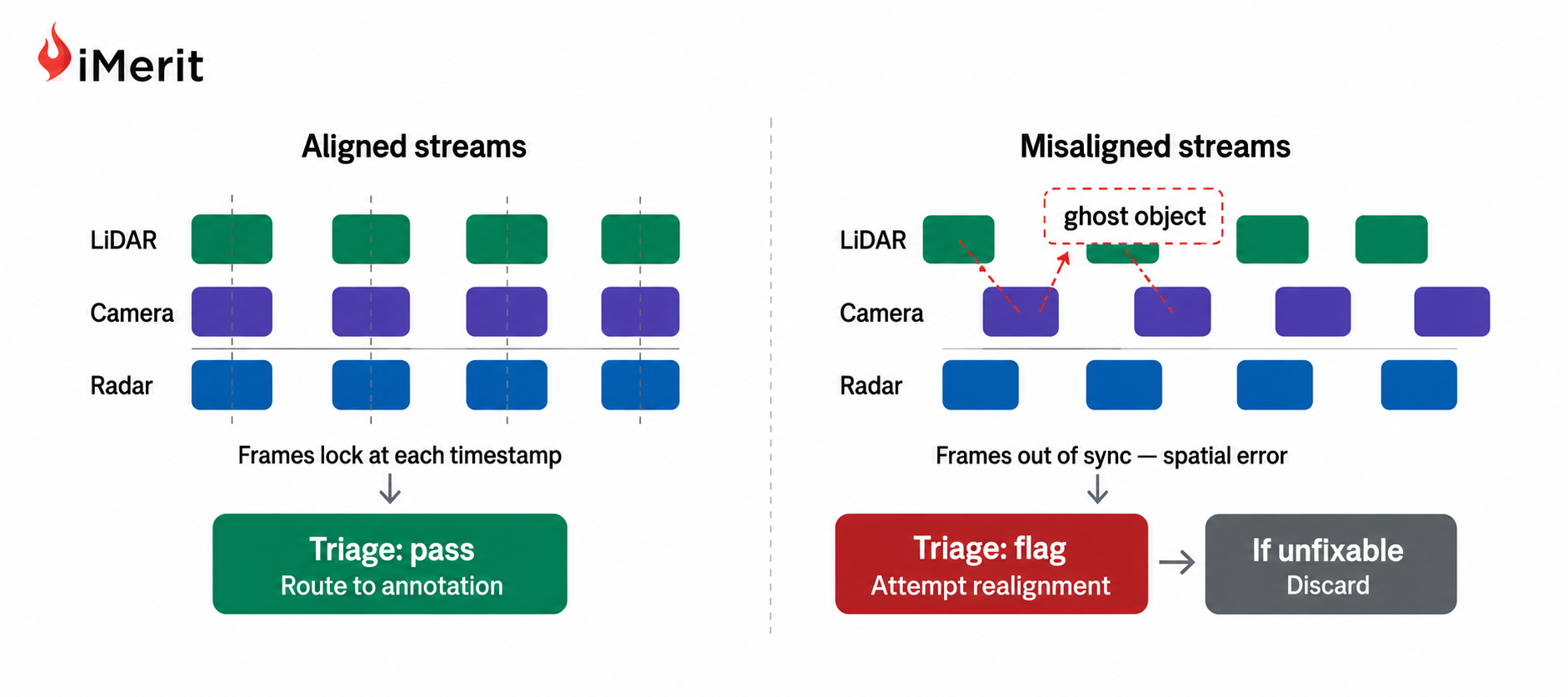
Temporal Alignment as a Triage Prerequisite
For multi-sensor fusion to work, all sensor data must be perfectly synchronized in time. A misaligned sensor log can lead to ghost objects and incorrect spatial estimations. Triage systems must flag these synchronization issues immediately. If the data cannot be realigned, it must be discarded to prevent it from corrupting the training set.
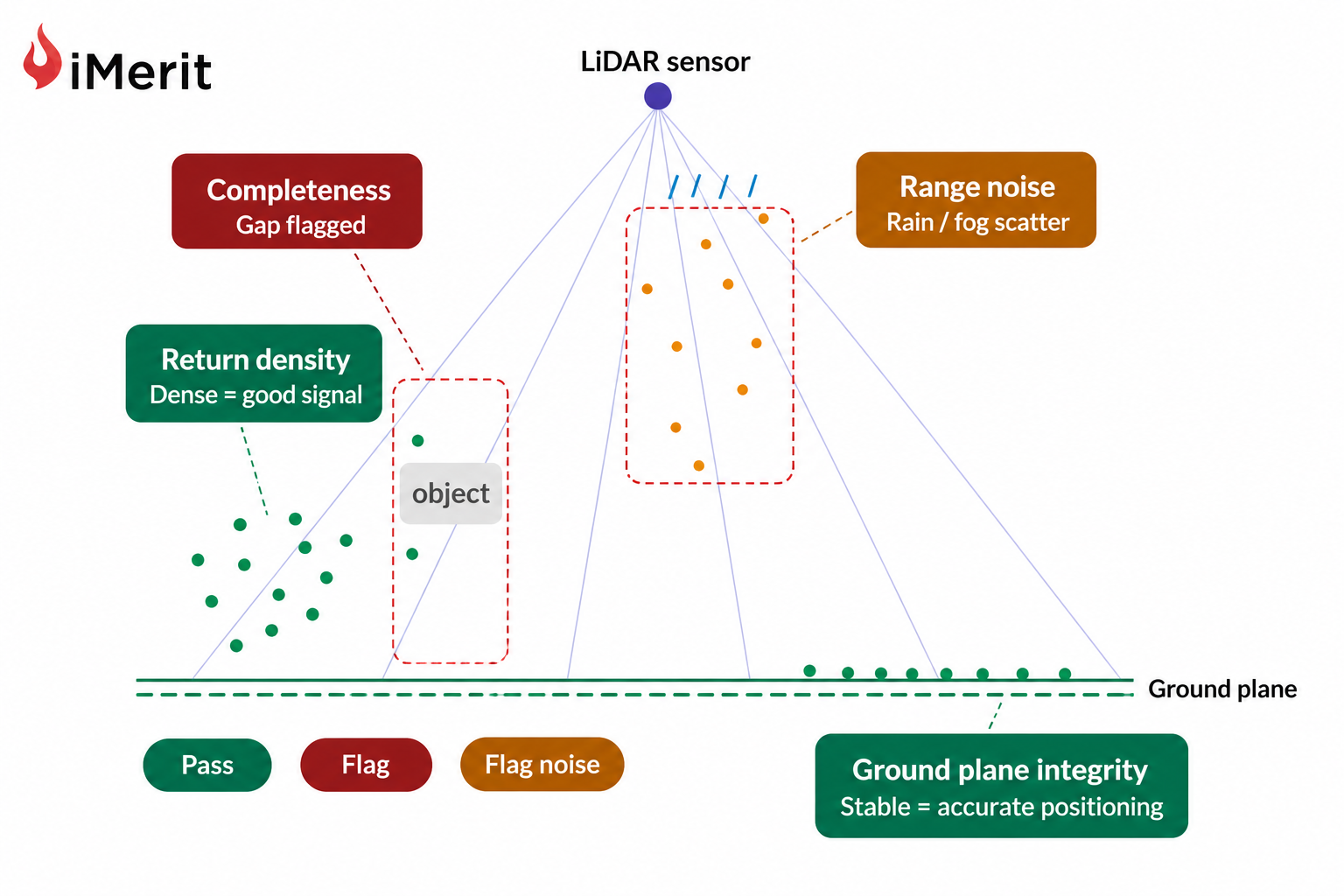
LiDAR-Specific Triage Signals
LiDAR triage evaluates 3D point cloud quality by checking return density, ensuring completeness against occlusions or hardware failure, and detecting range noise from environmental factors like rain or fog. It also verifies ground plane integrity to ensure accurate object positioning and path planning.
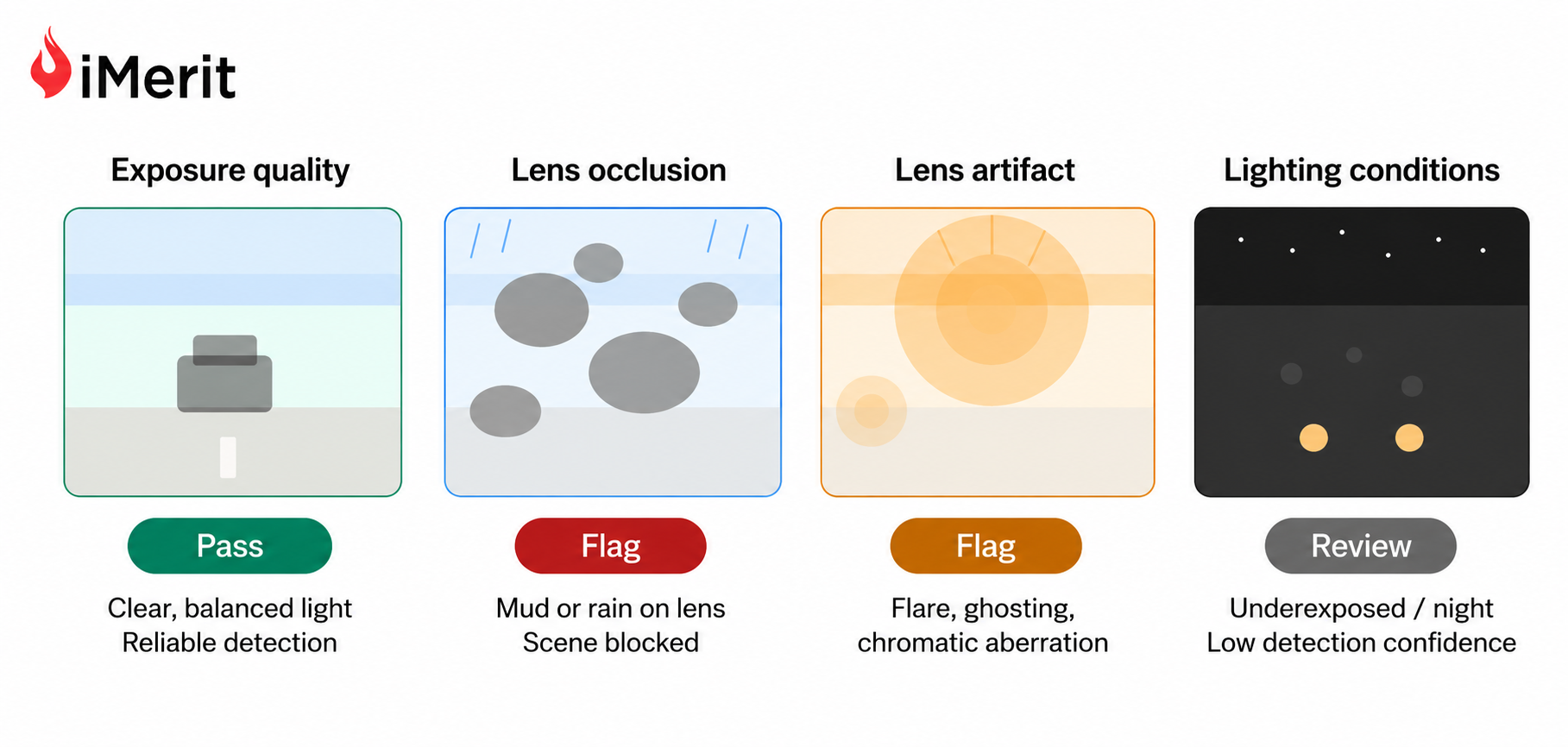
Camera-Specific Triage Signals
Camera triage focuses on analyzing image clarity and content. This involves assessing exposure quality, identifying occlusions like mud or rain, flagging lens artifacts, and ensuring lighting conditions are suitable for reliable object detection.
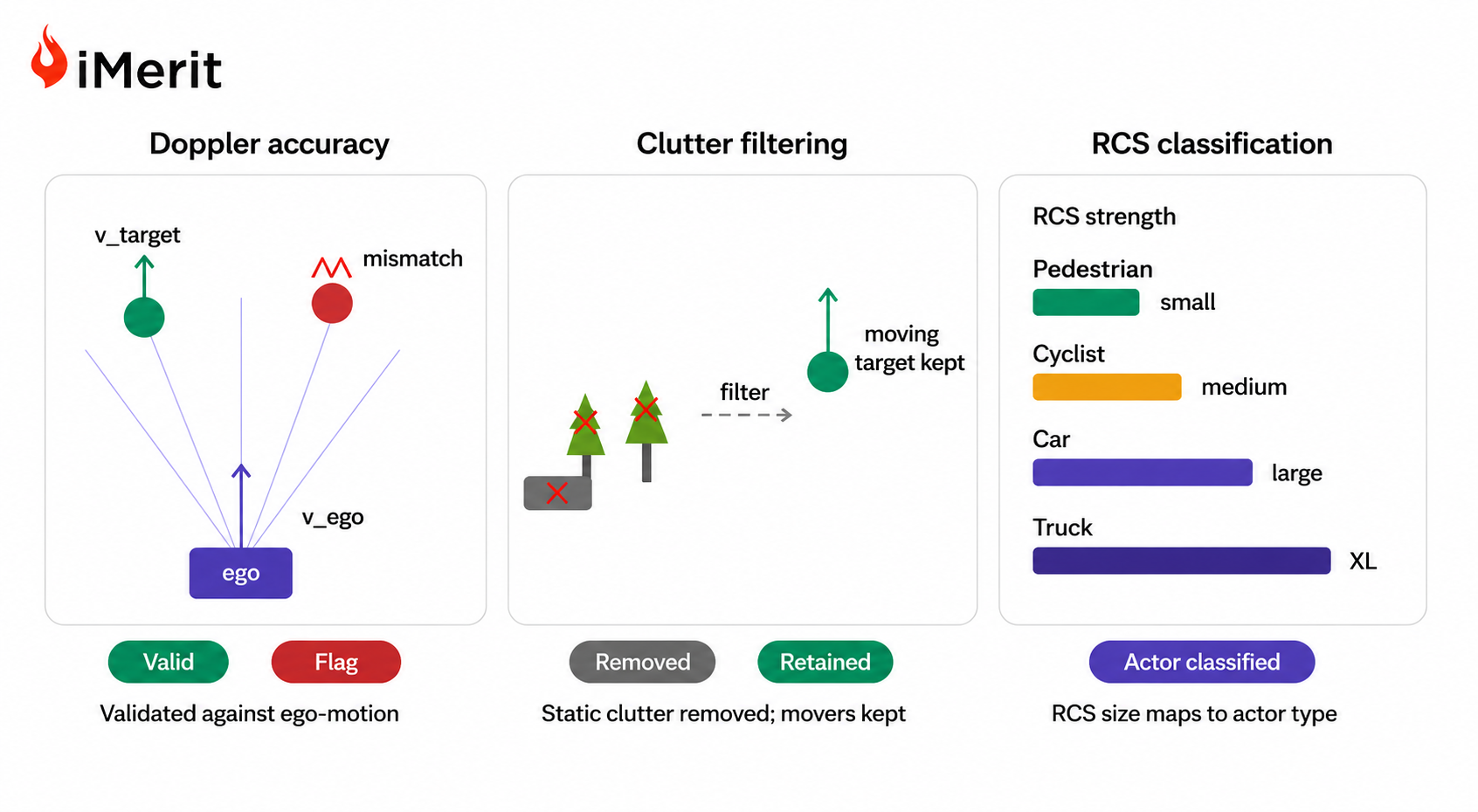
Radar Triage Considerations
Radar triage extracts high-value velocity data while removing noise. This involves validating Doppler accuracy against ego-motion and filtering out stationary environmental clutter to isolate moving targets. It also includes analyzing Radar Cross Section (RCS) returns to correctly classify actors like cars or pedestrians.
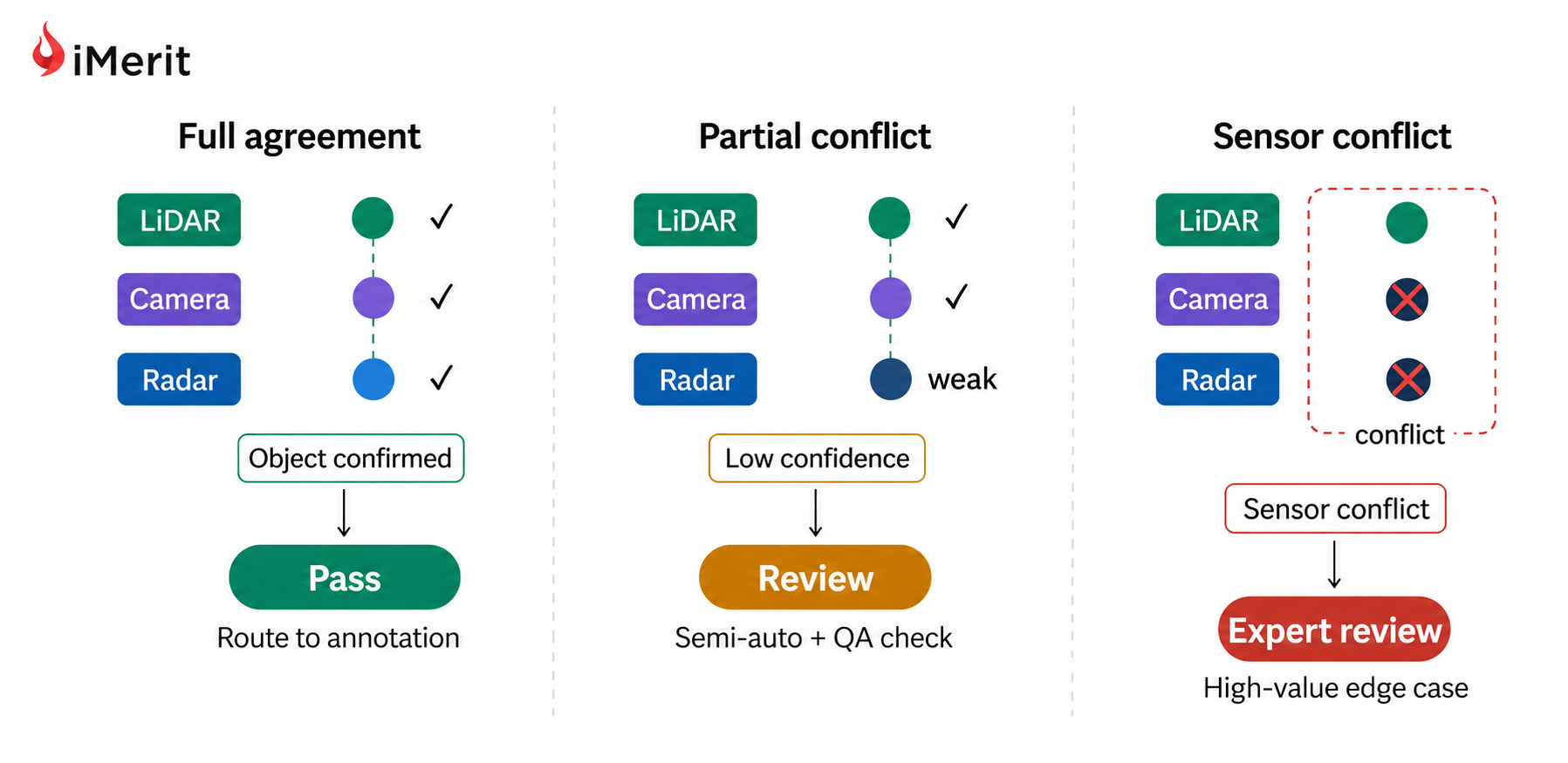
Fusion-Level Triage
Fusion-level triage evaluates the joint quality and calibration consistency of synchronized multi-sensor frames. It involves checking if objects are consistently represented across different sensors. If the LiDAR detects an object that the camera cannot see, the system flags a sensor conflict. These conflicts are often the most valuable data points for training, as they highlight the edge cases where the fusion algorithms need improvement.
Scenario Mining: Extracting High-Value Edge Cases from Operational Data
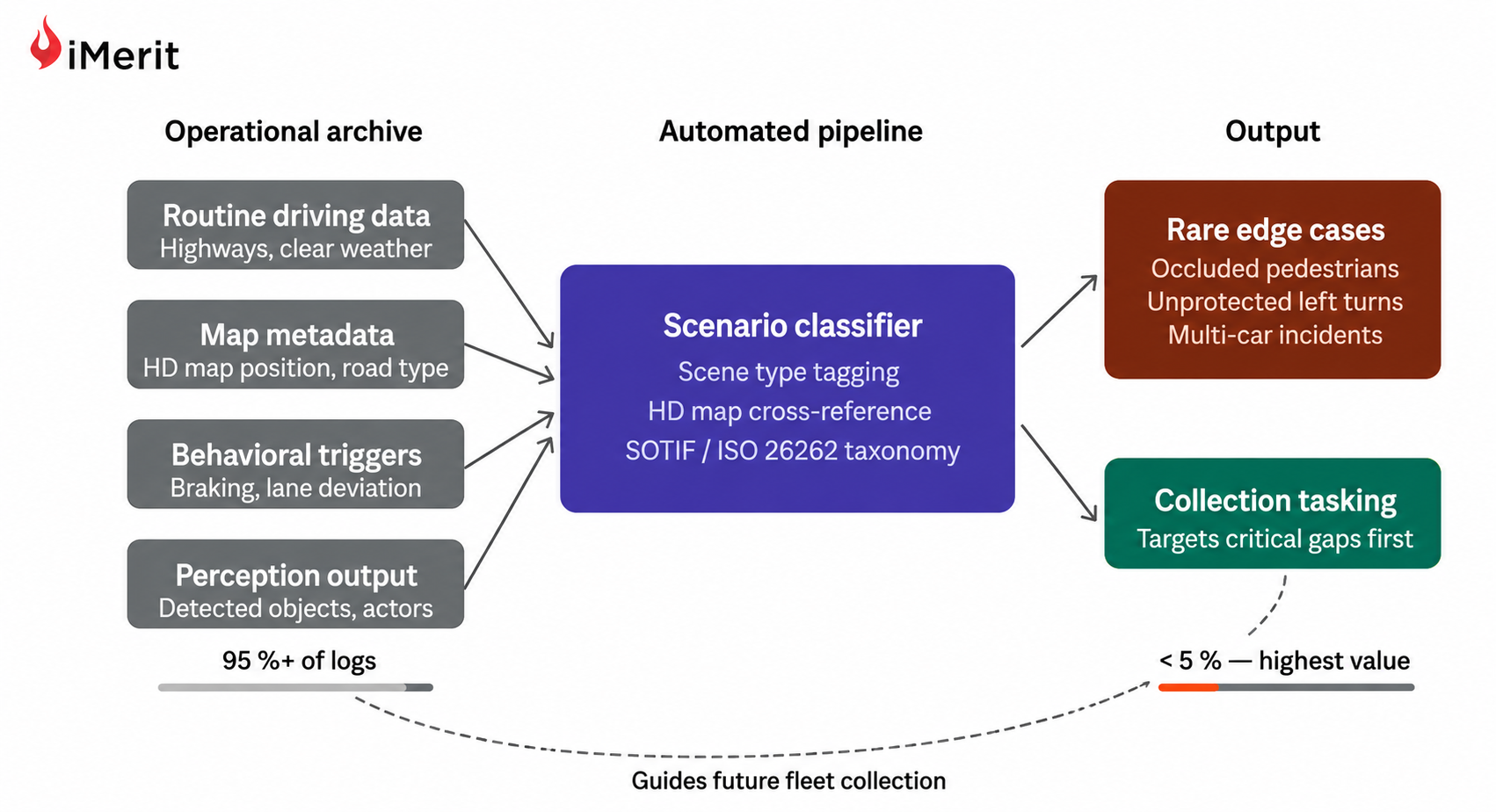
Scenario mining focuses on surfacing rare, safety-critical events from large operational datasets. Advanced sensor data triage systems aim to find these cases at scale. Automated pipelines use perception data and map metadata to label scenes by type. The system identifies specific environments, such as unprotected left turns or busy tunnels, by checking the vehicle’s position on high-definition maps. It also flags triggers like sudden braking, lane deviations, or proximity to other actors.
Developers use taxonomies aligned with safety standards like SOTIF (ISO 21448) and ISO 26262 to organize and prioritize these findings. This process turns unknown scenarios into known training data, providing the information necessary to train systems for safe operation. This prioritized coverage then guides the fleet’s future data collection to address the most critical safety gaps first.
Closing the Loop: Translating Triaged Edge Cases into Ground Truth with iMerit
Building a triage-to-annotation pipeline requires technical infrastructure and domain-specialized annotation expertise. iMerit supports enterprise AV teams across both.
- Data Curation and Scenario Mining: iMerit supports structured data curation pipelines that identify high-value sensor logs for annotation, including rare scenario extraction and quality-based prioritization across multi-sensor datasets.
- High-Precision LiDAR and Multi-Sensor Annotation: Expert annotation of triaged point cloud and camera data, including semantic segmentation, 3D cuboids, lane boundaries, and instance segmentation with rigorous QA workflows.
- Multi-Sensor Fusion Annotation: Synchronized labeling across LiDAR, cameras, and radar to ensure boundary and semantic consistency across fused sensor modalities.
- Ango Hub: AI-Powered Annotation Platform: Auto-labeling assistance combined with expert human review to scale annotation throughput on triaged datasets without sacrificing precision.
- Expert-in-the-Loop QA: Specialized multi-stage QA workflows to ensure that the most difficult scenarios flagged during the triage phase meet production-grade quality standards.
Conclusion
Sensor data triage defines the quality, coverage, and cost-efficiency of the autonomous vehicle training pipeline. It is not enough to simply collect massive amounts of data. Teams must efficiently prioritize high-value data and route each clip to the right annotation workflow. As fleets continue to scale and generate increasing volumes of data, integrating automated triage with expert human review will be key to building safe and reliable autonomous systems.
Looking to build a scalable sensor data pipeline for your AV program? Talk to our automotive data experts.